| LED回路工作部屋 (トップ) > パソコンでNゲージを自動運転するセット |
| パソコンでNゲージを自動運転するセット [M-07] |
|
|
|
【ページ選択】 ・商品の紹介 ・取扱説明 【 各部の接続について 】 ・取扱説明 【 自動運転の説明(プログラムの作り方など) 】 ・取扱説明 【 制御ソフトの説明 (A-標準タイプ) 】 ・取扱説明 【 制御ソフトの説明 (B-時刻表タイプ) 】 ・制御ソフトのダウンロード ・ユーザー様・管理人の自動運転紹介、参考資料 取扱説明 制御ソフトの使い方(A-標準) 制御ソフトの使用説明です。使用説明は 手動運転 と 自動運転 (プログラム運転) に分かれます。 不明な点がありましたら管理人 ( led_kairo@yahoo.co.jp ) まで質問して下さい。 説明項目 ※項目名をクリックするとジャンプします 通信の開始 手動運転 ① 車両の操作 ② 電動ポイントの操作 ③ 車両検知センサー 自動運転 (プログラム運転) ① プログラム運転の 開始 と 停止 ② プログラム運転用のプログラムの作り方 1.プログラムについて 2-1.プログラム例 (その1) 2-2.プログラム例 (その2) 2-3.プログラム例 (その3) 2-4.プログラム例 (その4) 2-5.プログラム例 (その5) 2-6.プログラム例 (その6) 3.プログラムの記述を見易くする機能 4.実際にプログラムを作成する方法 (参考) 5.プログラム作成時の注意点 通信の開始 制御基板との通信ができないと制御できませんので、下記手順で通信中の状態にします。 制御基板では通信状態になると(Pw)LEDが点灯状態になります。通信をしていないと(Pw)LEDは点滅しています。  手動運転 ① 車両の操作 ① 加速ボタン : 出力(パワー)が増加し、車両が加速します。 ② 減速ボタン : 出力(パワー)が減少し、車両が減速します。 ③ 停止ボタン : 出力(パワー)がゼロになり、車両が停止します。 ④ 前/後ボタン : 車両の進行方向(前進・後退)を切り換えます。⑤で現在の状態[前進]または[後退]が分かります。制御基板では[後退]時に(D)LEDが点灯します。 ⑥ 出力表示 : 現在の出力状態を表示します。0%~100%の間で変化します。 ⑦ PWM周波数表示 : 現在のPWMの周波数を表示します。PWM周波数は⑩で変更可能です。 ⑧ 増減間隔 : 車両が加速・減速する際の増減幅を設定します。標準の100msでは100ms毎に1%出力が増減します。 ⑨ 出力下限値 : 出力の下限値を設定します。停車中に車内灯などを点灯させたい時に使用します。 ⑩ PWM周波数指定 : PWMの周波数を変更します。低速走行時のスムーズさや、モーター音が変化します。  ② 電動ポイントの操作 電動ポイントの 個別操作 または 同時操作 が行えます。 電動ポイントは動作時間設定が可能です。 [P1分岐] [P1直進]ボタン : 電動ポイントNo1 側の 分岐 / 直進 の操作を行います。 [P2分岐] [P2直進]ボタン : 電動ポイントNo1 側の 分岐 / 直進 の操作を行います。 電動ポイントの動作時間 : 電動ポイントに電流を流す時間を調整できます。特に動作に問題なければ初期値(30ms)のままにして下さい。 ポイント動作中ランプ : 電動ポイント動作中(通電中)は赤く点灯します。点灯中は他の電動ポイントの操作は行えません。基板では(Pi)LEDが動作中に点灯します。  ③ 車両検知センサー 車両検知センサーは自動運転時に線路付近に設置して、車両の通過を検知します。自動運転で検知したら車両を停止させる等で使用します。 制御基板のS1(センサー1)、S2(センサー2)に車両検知センサーを接続して使用した場合、S1、S2が検知状態になるとそれぞれ青に点灯します。  自動運転 (プログラム運転) ① プログラム運転の 開始 と 停止 ※下図は最新のソフトと配置が若干違いますが、基本的なところは同じなので、そのまま使いますがご了承下さい。 プログラム運転の開始手順の説明です。 アプリ起動時に programフォルダ内のテキストファイルを確認し、リストにプログラム一覧を表示します。プログラムの追加をした場合は [更新]ボタンで再表示を行って下さい。 手順 1 "①プログラムリスト" から実行するプログラムを選択し、プログラムの記述に問題がなければ "②プログラム記述判定" に "プログラムOK" の表示が出ます。 手順 2 選択したプログラムを繰り返し実行する場合は ④ にチェックを入れて下さい。 手順 3 "③プログラム運転"ボタン を押すと、運転が始まります。もう一度押すと運転停止になります。 プログラム実行中は、⑤ のプログラム内容に従い プログラムアドレス順に動作します。 ⑥ に実行中のプログラムアドレスを表示します。  ② 自動運転運のプログラムの作り方 1.プログラムの作成 プログラムを作る際は、サンプルプログラムをコピーしてファイル名を変更し、内容を書替えて下さい。新しいテキストで保存すると文字化けする場合があります。 プログラムは プログラムコード表 の プログラムコード を動作させたい順番に記述して作成します。作成したプログラムは テキストファイル (.txt) で programフォルダ に保存します。 プログラムコード は、"動作コード" の後に "カンマ( , )" で区切って "設定コード" を追加します。これで1つの プログラムコード になります。  2.プログラム例 基本的なプログラム例を紹介します。このプログラム例を参考にいろいろと組み合わせれば、細かな動作も可能です。 2-1.プログラムの例 (その1) 車両を動作させるだけのプログラム例です。 車両が前進方向へゆっくりパワー30まで加速します。 動作方向を前進にして ( d,0 ) 、ゆっくり加速(あり)に設定し ( ps,1 )、パワー30まで加速する ( pw,30 )。 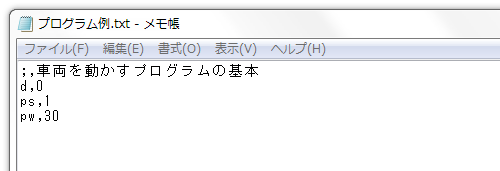 2-2.プログラムの例 (その2) 車両が動作し、停止するまでのプログラム例です。 車両が前進方向へゆっくりパワー30まで加速します。そのまま10秒走行して、パワー0になり停止します。 動作方向を前進にして ( d,0 ) 、ゆっくり加速/減速(あり)に設定し ( ps,1 )、パワー30まで加速する ( pw,30 )。 ゆっくり加速/減速(なし)に設定し ( ps,0 )、10秒走行し ( t,100 )、パワー0で停止する ( pw,0 )。 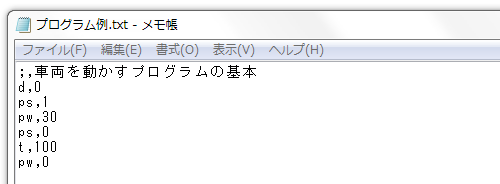 2-3.プログラムの例 (その3) 車両の往復運転のプログラム例です。 動作方向を前進にして ( d,0 ) 、ゆっくり加速/減速(あり)に設定し ( ps,1 )、パワー30まで加速する ( pw,30 )。 ゆっくり加速/減速(なし)に設定し ( ps,0 )、10秒走行し ( t,100 )、パワー0で停止する ( pw,0 )。 5秒停止 ( t,100 )。 動作方向を後退にして ( d,1 ) 、ゆっくり加速/減速(あり)に設定し ( ps,1 )、パワー30まで加速する ( pw,30 )。 ゆっくり加速/減速(なし)に設定し ( ps,0 )、10秒走行し ( t,100 )、パワー0で停止する ( pw,0 )。 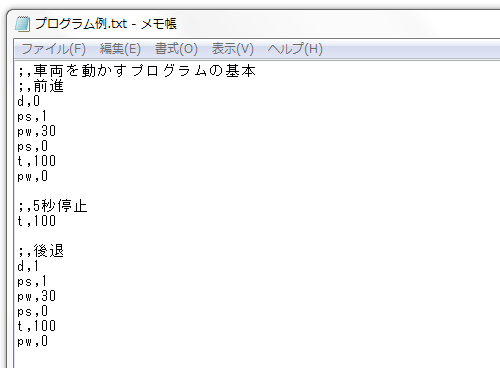 2-4.プログラムの例 (その4) 車両検知センサーを使用して停止を行うプログラム例です。 【 車両検知表示 】 車両検知センサーの検知状態を表示します。検知すると表示が点灯する。  動作方向を前進にして ( d,0 ) 、ゆっくり加速/減速(あり)に設定し ( ps,1 )、パワー30まで加速する ( pw,30 )。 ゆっくり加速/減速(なし)に設定し ( ps,0 )、車両検知センサー1が検知するのを待つ ( s,1 )。 検知後、停止する ( pw,0 )。 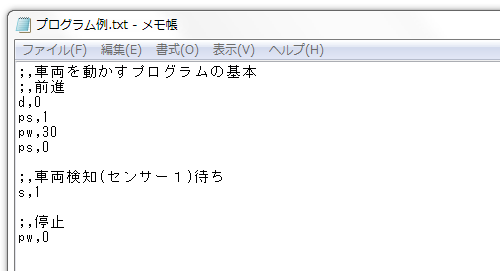 2-5.プログラムの例 (その5) 電動ポイント1、2を分岐側にします。 pi,a1 pi,a2 電動ポイント1、2を直線側にします。 pi,b1 pi,b2 2-6.プログラムの例 (その6) 電動ポイントを使って、直進側から出発した車両が、1周回って分岐側を通過し、2周目は直進側へ侵入し車両検知センサーで停止するプログラム例です。 直進側から車両が前進方向へ動き、pw30まで加速したら電動ポイント1、2を分岐側にします。 車両が分岐側を通過し、センサー2が検知したら2秒後に電動ポイント1、2を直線側にします。 車両は5秒後(この秒数は車両の動きを見て調整します)にpw15に減速し、ゆっくり直進側へ侵入し、センサー1が検知したらpw0にして車両を停止させて終了です。   2-6.プログラムの例 (その7) エンドレスの線路で、出発した車両が、3周回って停止するプログラム例です。 車両が前進方向へ動き、pw30まで加速したらセンサー1の検知を待ちます。同じように2周目、3周目の検知が終わったら、 5秒後(この秒数は車両の動きを見て調整します)にpw15に減速し、ゆっくり直進側へ侵入し、センサー1が検知したらpw0にして車両を停止させて終了です。 使用する車両によっては、1周目、2周目の検知後にt,30(s,1の後にt,30)を入れたほうがいいかもしれません(センサー検知のチャタリング防止)。   3.プログラムの記述を見易くする機能 プログラムの記述を見易くするために、プログラム中に 空欄 と コメントの記述 ができます。 コメントの記述 は、セミコロン( ; ) + カンマ ( , ) + コメント で記述して下さい。  4.実際にプログラムを作成する方法 (参考) プログラムは少しづづ車両の動きを確認しながら下図のように画面を配置し、 ①~④ を繰り返しながら行うと作り易いと思います。 ① プログラム記述、 ② ファイル保存、 ③ プログラムの更新、 ④ 自動運転開始 を繰り返します。  5.プログラム作成時の注意点 作成の際の注意点です。 ・アプリでは "Shift-JIS" で記述した文字を取り込みます。 "Shift-JIS" 以外で記述した文字だと 文字化け するので、その場合はサンプルプログラムを コピーして内容を書き換えて下さい。 ・プログラムはメモ帳などで作成できます。テキストファイル(.tex) として保存して下さい。プログラムのファイルは "programフォルダ" に入れて下さい。 ・プログラムは最初から上手くは動作しないので、車両を動かし、間違ったところのプログラムを修正しながら仕上げて下さい。  |
||